Jean-Christophe Lamanque, Katherine Zamudio-Turcotte, Mohamed El Amine Elforaici, Sri Venkata Vathsala Musunuri, Rafael Daigneault, Marion Thénault, Rachad Chazbek, Hubert Pilote, Gabriel Asselin, Auriane Thilloy, Julien Lavergne Roberge, David Vlassov, Joël Restrepo-Vermette, Andrew Karim, Giovanni Beltrame
Université McGill, Polytechnique Montréal, Université Concordia, Université de Montréal, Université Laval
5a. Résumé
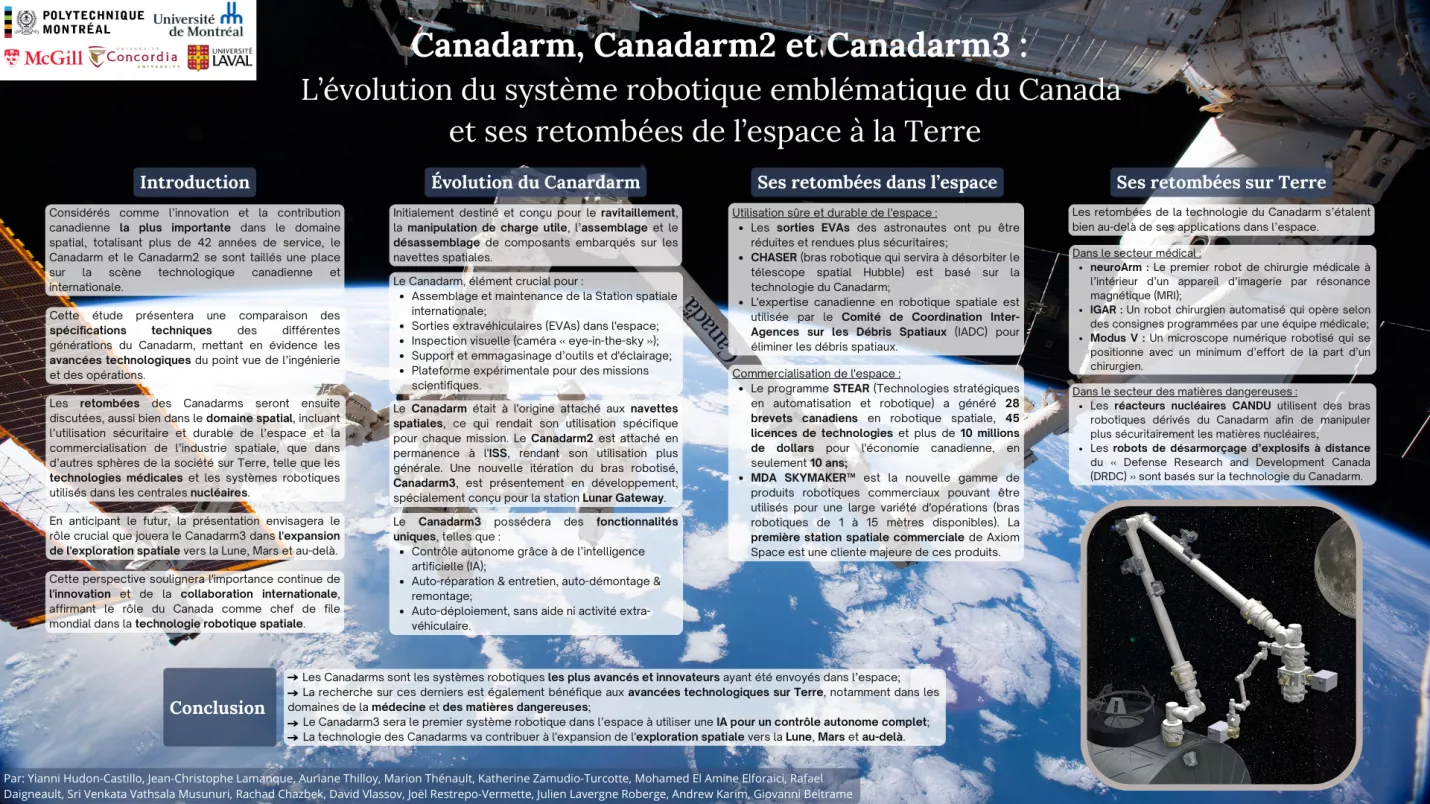
Considérés comme l’innovation et la contribution canadienne la plus importante dans le domaine spatial, totalisant plus de 42 années de service, le Canadarm et le Canadarm2 se sont taillés une place sur la scène technologique canadienne et internationale. Alors que le développement de la nouvelle génération de ce système se poursuit avec le Canadarm3 sur la future station spatiale lunaire Gateway, un retour sur l’évolution de cette technologie robotique couvrant différents programmes spatiaux s’impose. L’étude présentera une comparaison des spécifications techniques des différentes générations du Canadarm, mettant en évidence les avancées technologiques du point vue de l’ingénierie et des opérations. Les retombées des Canadarms seront ensuite discutées, aussi bien dans le domaine spatial, incluant l’utilisation sécuritaire et durable de l’espace et la commercialisation de l’industrie spatiale, que dans d’autres sphères de la société sur Terre, telle que les technologies médicales et les systèmes robotiques utilisés dans les centrales nucléaires. En anticipant le futur, la présentation envisagera le rôle crucial que jouera le Canadarm3 dans l'expansion de l'exploration spatiale vers la Lune, Mars et au-delà. Cette perspective soulignera l'importance continue de l'innovation et de la collaboration internationale, affirmant le rôle du Canada comme chef de file dans la technologie robotique spatiale.
Connexion requise
Pour ajouter un commentaire, vous devez être connecté.